
Bump impact velocity, suspension stroke depth, spring rate, sprung weight and damping create a confusing combination of variables when trying to understand suspension response. However, the fundamentals of spring-mass-damper theory significantly simplify that complex problem defining there are only two parameters that completely control suspension response, tau and zeta. Any suspension, regardless of weight, spring rate or damping, will produce exactly the same response when the values of tau and zeta are set to be the same.
That fact from spring-mass-damper theory provides a powerful tuning tool giving a direct method to scale suspension setups from one rider weight to another, quantify the effect of damping force changes and define the rebound damping force needed to optimize suspension response regardless of bump impact velocity or stroke depth.
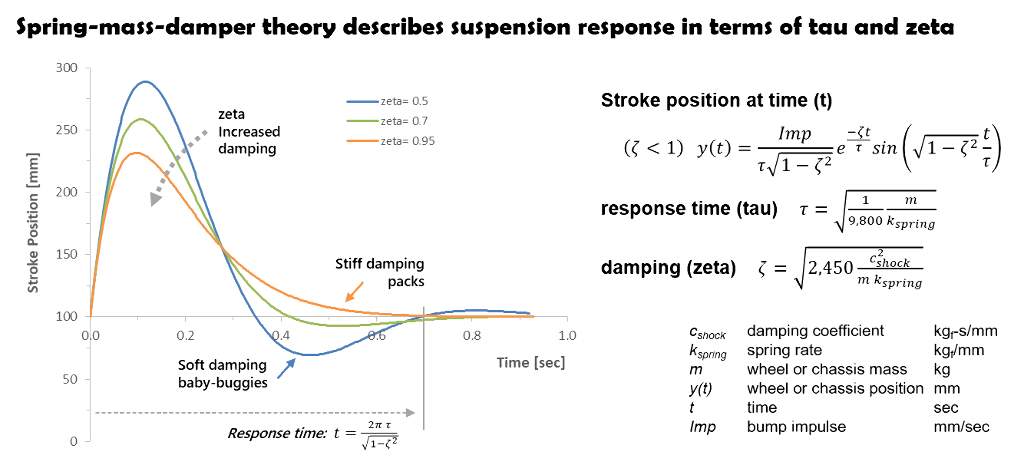
Tau defines response time
Tau defines the time required for the suspension to return to race sag, aka the suspension natural frequency. Tau is defined as the square root of mass over spring rate, basically equivalent to race sag plus the spring preload. Stiff springs run with low preload give a faster suspension response.
Zeta defines damping
Zeta values of one are critically damped. Critically damped means the suspension dissipates all of the bump energy and smoothly returns to race sag with no overshoot. Zero overshoot is desirable (orange line). However, the stiff damping required produces slow response causing the suspension to pack.
Zeta values less than one are underdamped. Underdamped motions significantly improve response time (blue line), however the rebound stroke overshoots race sag and baby-buggies back. Baby-buggy motions give the suspension poor “feel”.
The two parameters tau and zeta completely define suspension motions. Individual values of weight, spring rate or damping don’t matter. All that matters is the combination of those parameters as defined by the tau and zeta equations. That fact significantly simplifies suspension tuning quantifying the suspension response, “feel” and behavior in terms of two basic tuning parameters.
Suspension resonance
The worst possible scenario for any suspension is hitting the next bump while the suspension is still recovering from the previous bump. When that happens, the bump impact amplifies residual motions from the previous bump driving the suspension into resonance.
Spring-mass-damper theory defines the damping required to suppress suspension resonance motions and that damping requirement is zeta values of 0.707 or greater. That fact uniquely defines zeta values of 0.707 to provide the fastest possible suspension response with damping that is still stiff enough to suppress suspension resonance motions. Performance suspension systems target zeta values of 0.707 for rebound damping.
Seat bounce test
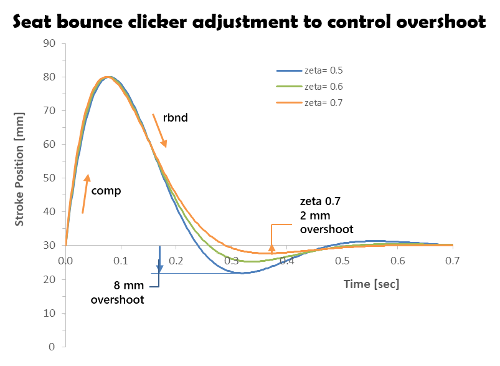
A seat bounce test compress the suspension a couple of inches from free-sag and estimates the rebound stroke overshoot on return to free-sag.
The “rule of thumb” is the suspension should slightly overshoot and settle.
Spring-mass-damper theory shows a 50 mm stroke from free-sag produces an 8 mm overshoot when run with rebound damping of zeta 0.5. Cranking down the clickers to increase rebound damping to zeta 0.7 reduces the overshoot to 2 mm.
Seat bounce testing gets zeta in the ballpark of 0.7, but the exact value of overshoot is difficult to visually quantify.
Clicker tuning
Riders have an uncanny ability to twirl clickers on a test ride and arrive at zeta values near 0.7. The reason is simple:
- Damping softer then zeta 0.7 allows the suspension to baby-buggy after a bump giving poor suspension “feel”
- Zeta values stiffer than 0.7 produce slow response causing the suspension to pack
A typical shock tuning problem is demonstrated in the example below. The rider has twirled clickers on a test ride to correct for an underdamped rebound stroke.
Screwing the clickers in corrects rebound damping for short strokes around race sag, but when pushed deeper in the stroke on a whoop impact or jump landing the underdamped rebound stroke causes the suspension to kick.
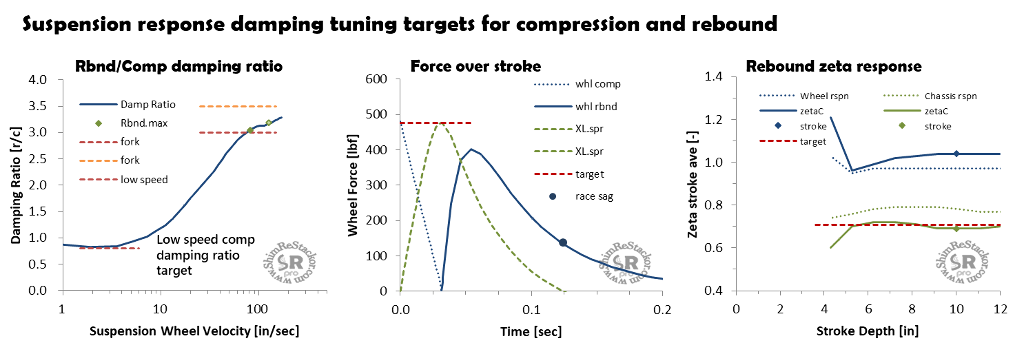
Correcting the setup requires stiffer high speed rebound damping to produce a constant zeta value of 0.7 across the stroke depth range. ReStackor suspension response calculations make the correction easy and simply requires hacking around on the rebound shim stack to produce a constant value of zeta across the range of suspension stroke depths.
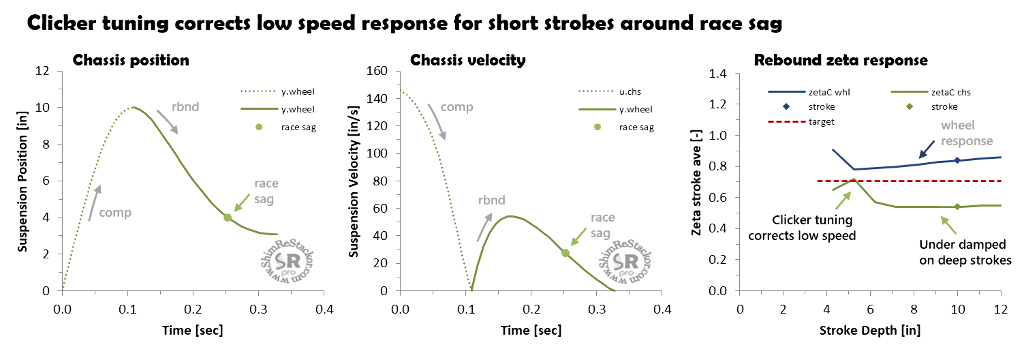
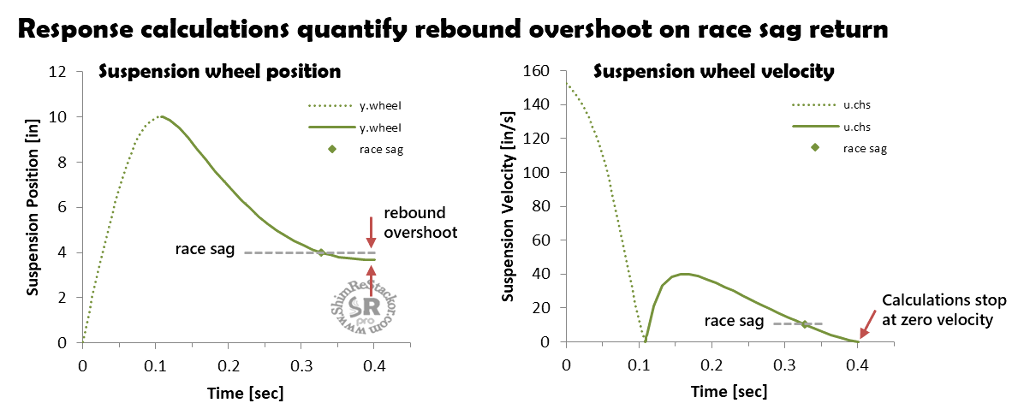
Response calculations compute peak rebound velocity as a function of stroke depth and shock damping
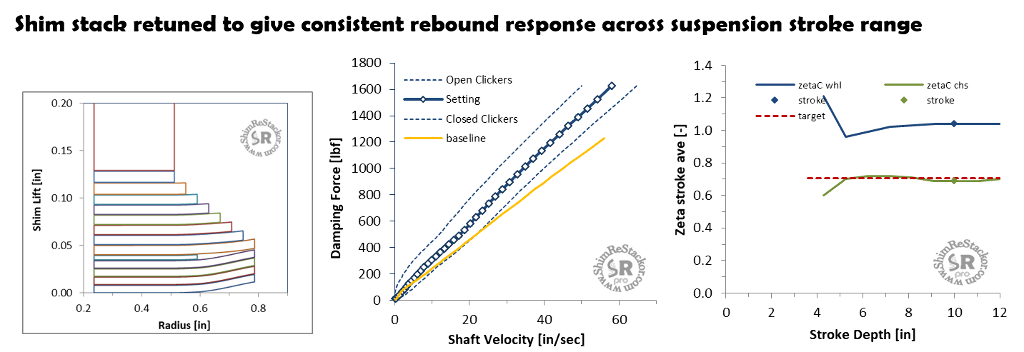
Rebound shim stack tuning
Getting a flat zeta curve across the range of suspension stroke depths simply requires hacking around on the shim stack configuration, adding or removing shims, to produce a constant 0.7 zeta value across the stroke depth range.
In this case, the shim stack requires a larger crossover diameter and a stiffer high speed stack to flatten the zeta curve.
Zeta values less than one are underdamped. Underdamped means the rebound stroke will over shoot race sag and baby-buggy back. Baby-buggy motions give the suspension a loose and uncontrolled “feel".
Tuners have a trick to suppress the baby-buggy motions of an underdamped rebound stroke using stiff low speed compression damping at ultra-low suspension velocities.
Stiff low speed compression damping catches the rebound overshoot, holds the suspension “high in the stroke” and heavily damps the overshoot return stroke to prevent further baby-buggy motions. The overshoot return stroke occurs at ultra-low compression velocities from 0 to 6 in/sec.
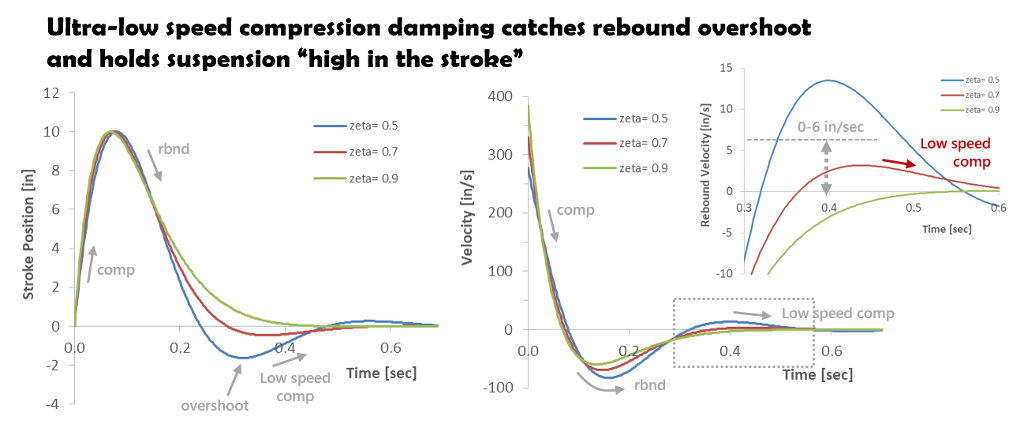
Tuning targets for Shim ReStackor suspension response calculations set the low speed rebound/compression damping ratio at 0.8:1. With rebound tuned to zeta 0.7 the target damping ratio gives a low speed compression zeta value of 0.88. The near critical low speed compression damping heavily damps the overshoot return stroke and prevents further baby-buggy motions of the suspension.
Fork base valves, shock compression adjusters, bleed circuits and rebound separator valves provide tuning circuits for the control of ultra-low speed compression damping in the 0 to 6 in/sec range.
Low speed bump compliance
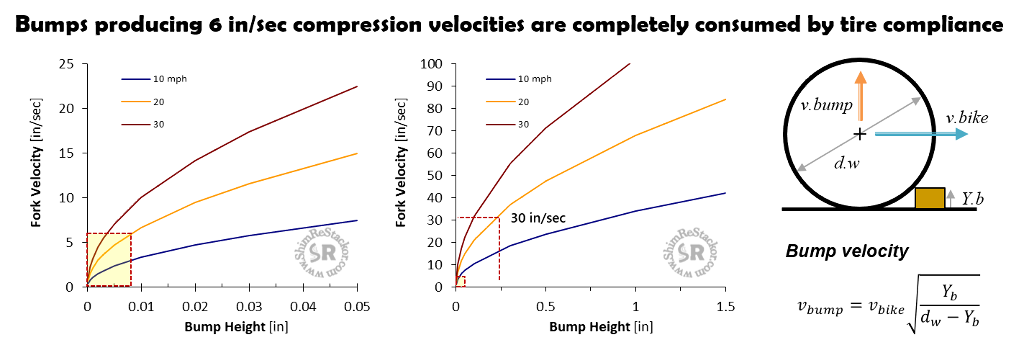
Stiff compression damping at ultra-low suspension speeds has no impact on bump compliance. A 1/125 inch bump hit at 20 mph produces a compression bump velocity of 6 in/sec. Bumps that small are completely consumed by tire compliance.
Practical sized bumps in the ¼ inch range produce compression bump velocities of 30 in/sec when hit at 20 mph.
Tuning ultra-low speed compression damping to blow-off above 6 in/sec gives the stiff low speed damping needed to control rebound overshoot and the lighter damping at 30 in/sec needed for compliance on small ¼ inch bumps and trail trash.
Rebound tuning for rocks
Suspension setups for rocks run softer rebound damping to reduce packing and stiffer rebound damping at high speed to keep the suspension from kicking in the whoops and jump landings.
Suspension response calculations provide damping targets to do that while maintaining a consistent suspension “feel” across the stroke depth range.
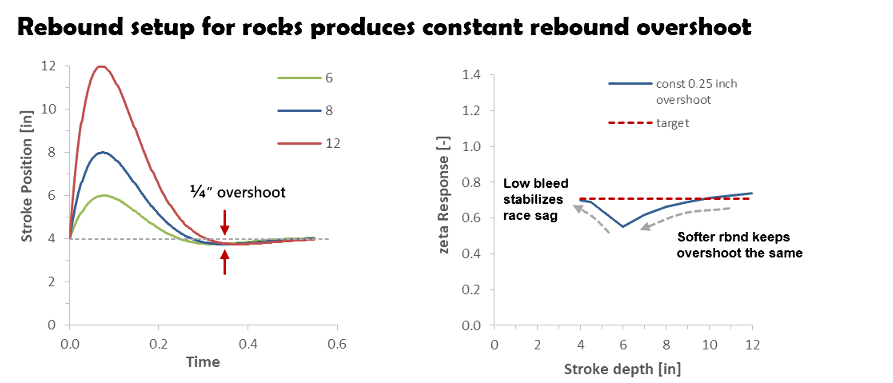
On a ten inch bottoming stroke, rebound damping at zeta values of 0.7 produce a ¼ inch overshoot on return to race sag. Producing that same ¼ inch overshoot on shorter six and eight inch strokes requires lighter rebound damping.
Lighter rebound damping on shorter strokes gives faster response getting the wheels back on the ground faster, reducing packing and improving suspension compliance through the rocks. Stabilizing the chassis with the increased rebound overshoot, requires stiff low speed compression damping to catch the ¼ inch overshoot, heavily damp the return stroke and quite the suspension at race sag.
The example below tunes 10 and 12 inch suspension bottoming strokes to produce rebound response zeta values of 0.7. Stiff rebound on deep strokes keeps the suspension from kicking in the whoops and on jump landings.
Shorter strokes in the 6 to 8 inch range run lighter rebound damping tuned to produce the same ¼ inch overshoot. Constant overshoot gives the suspension a consistent “feel” and the lighter rebound damping gives faster response to reduce packing in the rocks.
Stroke depths below six inches (two inch bump stroke from race sag at four inches) use the clicker bleed circuits to increase low speed rebound and produce rebound damping zeta values near 0.7 for small motions around race sag. Rider preference opening or closing the clicker circuits ultimately sets the short stroke behavior.
Setting rebound damping to produce a constant ¼ inch race sag overshoot gives short strokes fast response to improve compliance in the rocks. Maintaining that same ¼ overshoot progressively increases rebound damping to provide zeta 0.7 damping on bottoming strokes to keep the chassis from kicking on whoops and jump landing impacts.
Suspension “feel” with the underdamped rebound stroke heavily relies on stiff low speed compression damping to catch the rebound overshoot and damp the return stroke to stabilize the chassis at race sag without baby-buggy motions.